Chapter 2. How do the Walther LGU, Walther LGV and FWB 124 compare?
Most of us would agree that the only thing more interesting than one airgun is more than one airgun!
Being able to compare and contrast airguns allows us to see aspects that normally would be hidden or taken for granted. In this chapter we look at three German spring piston air rifles in 0.177 caliber with muzzle energies around 12 ft-lb Figure 2.1 shows the three air rifles. In all the tests, I mounted the same Sightron SIIISS1050X60FTIRMOA-H scope.
Being able to compare and contrast airguns allows us to see aspects that normally would be hidden or taken for granted. In this chapter we look at three German spring piston air rifles in 0.177 caliber with muzzle energies around 12 ft-lb Figure 2.1 shows the three air rifles. In all the tests, I mounted the same Sightron SIIISS1050X60FTIRMOA-H scope.
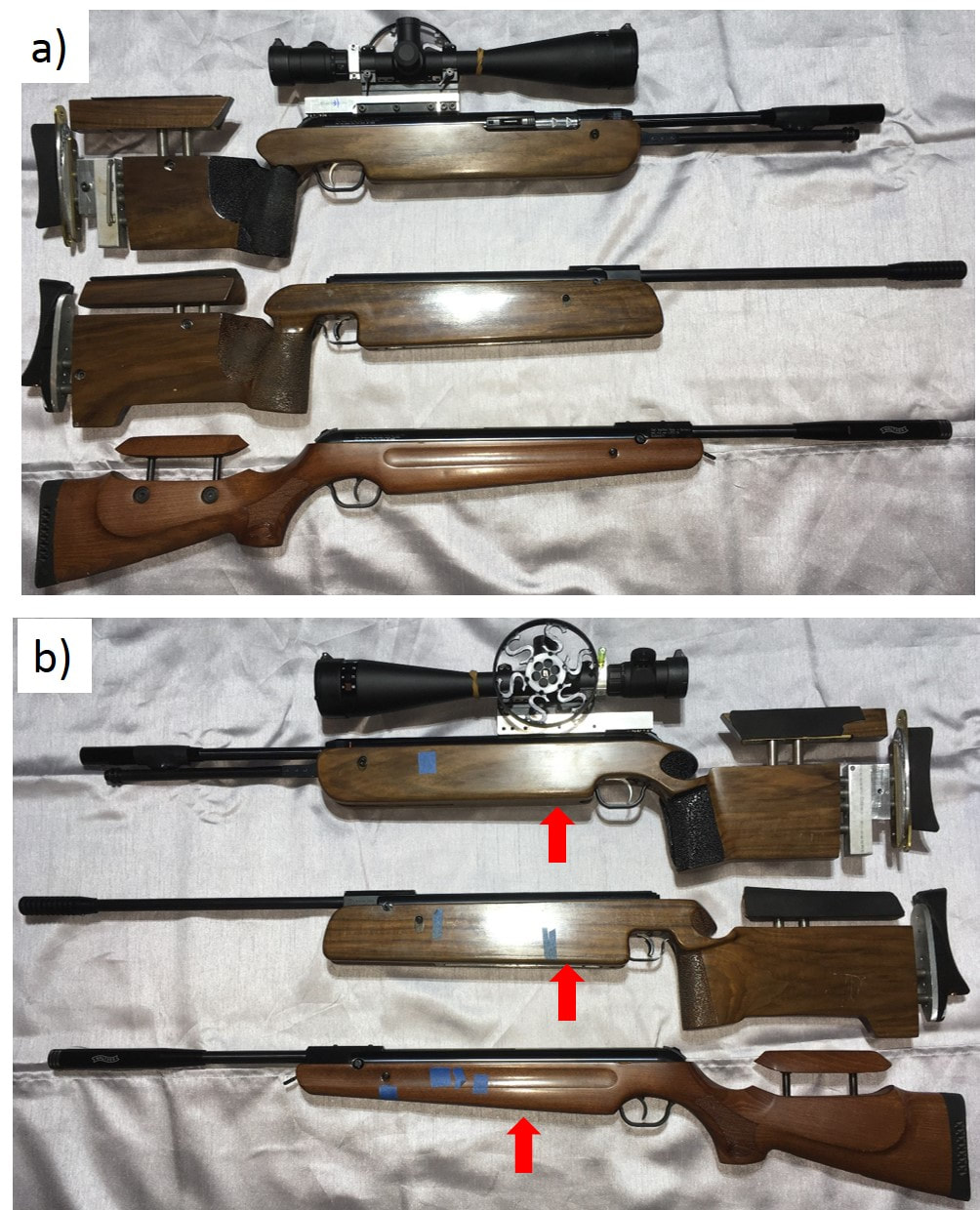
Fig. 2.1 The three protagonists in this story. Top to bottom are the Walther LGU with a Sightron SIIISS1050X60FTIRMOA-H scope, a FWB 124, and a CCA Modified Walther LGV Competition Ultra. All are 0.177” (4.5 mm) caliber. The LGU and FWB 124 stocks are homemade. The aluminum scope raiser block is also homemade. The blue painter’s tape in b) helps to position the forearm optimally and consistently on the front sandbag for benchrest shooting. Red arrows in b) indicate balance points.
All three rifles have been modified, so here’s a brief description of each rifle:
The Walther LGU
Walnut stock is homemade. The receiver is glass-bedded and all the stock screws are pillar-bedded with aluminum tubes. For more info on the stock, please see:
https://www.gatewaytoairguns.org/GTA/index.php?topic=164358.0
I also modified/changed some of the metal parts. The trigger is from Tony Leach:
https://www.airgunforum.co.uk/community/index.php?threads/tony-leach-lgu-trigger-blade.253470/
https://www.airgunnation.com/topic/walther-lgu-lgv-a-new-trigger-option/
I replaced the 15 ft-lb factory spring with a 12 ft-lb Walther LGU spring so that the rifle could be used in World Field Target competitions. I removed the muzzle cap and built a magnetic latch to hold the barrel in place. The original detent barrel latch was hard to use when wearing a shooting mitt and I was concerned that it may have been stressing the barrel. The weight of this rifle with the Sightron scope is 16.3 lbs. The scope with base and rings weighs about 3.4 lbs. For more details on these modifications, please see:
https://www.gatewaytoairguns.org/GTA/index.php?topic=168525.0
The FWB 124 was my first high quality air rifle that I bought in the early 1980’s. I installed the Maccari (Air Rifle Headquarters) Slightly Softer Mainspring kit. I made the stock out of the same walnut blank that was used for my LGU. The reason that there’s an aluminum block at the butt end of the LGU stock is that I didn’t have enough wood left for the LGU after making my FWB 124 stock! The trigger is a Maccari (Air Rifle Headquarters) stainless steel trigger. As with my LGU, the receiver is glass-bedded and all the stock screws are pillar-bedded with aluminum tubes. The weight of this rifle with the Sightron scope is 14.3 lbs. For more background on this rifle, please check out my post on the FWB 300S vs FWB 124 shootout:
https://www.tapatalk.com/groups/yellow/fwb-124-and-fwb-300s-shootout-t239102.html
The Walther LGV belongs to Hector. He custom-tuned it with an anti-bounce piston (ABP). The ABP has a cavity in an enlarged piston stem that holds a non-Newtonian fluid steel. The enlarged stem also functions as a spring guide, it just happens to be inside the piston, not at the rear, as usual. The fluid steel holds a shape (behaves like a solid) when accelerated or under pressure, but when acceleration becomes zero (as when the bounce cycle starts), then the steel becomes fluid again and tries to remain in position by its internal inertia. So the piston is stopped from bouncing and the piston, by holding the position in the compression chamber, maintains the pressure behind the pellet, so that with the same energy input, it can achieve almost 10% more muzzle energy. The weight of this rifle with the Sightron scope is 13.1 lbs.
In Fig. 2.2 I test the accuracy of these rifles at 20 yards. All the shooting was done indoors with the rifles rested on sandbags. In Chapter 3 we will discuss the statistics of group sizes, but I think the key point is that one needs to shoot multiple groups. A single 5-shot, or even a single 10-shot group, doesn’t really say much about accuracy. Maybe it’s just my scientific skepticism, but if someone shows me an amazing 5-shot one-hole group, my first question would be what did the group right before or after that one-holer look like?! With a high quality 50x scope and a solid rest, operator error has been pretty much removed and the group sizes and positions are strictly due to the rifle.
The Walther LGU
Walnut stock is homemade. The receiver is glass-bedded and all the stock screws are pillar-bedded with aluminum tubes. For more info on the stock, please see:
https://www.gatewaytoairguns.org/GTA/index.php?topic=164358.0
I also modified/changed some of the metal parts. The trigger is from Tony Leach:
https://www.airgunforum.co.uk/community/index.php?threads/tony-leach-lgu-trigger-blade.253470/
https://www.airgunnation.com/topic/walther-lgu-lgv-a-new-trigger-option/
I replaced the 15 ft-lb factory spring with a 12 ft-lb Walther LGU spring so that the rifle could be used in World Field Target competitions. I removed the muzzle cap and built a magnetic latch to hold the barrel in place. The original detent barrel latch was hard to use when wearing a shooting mitt and I was concerned that it may have been stressing the barrel. The weight of this rifle with the Sightron scope is 16.3 lbs. The scope with base and rings weighs about 3.4 lbs. For more details on these modifications, please see:
https://www.gatewaytoairguns.org/GTA/index.php?topic=168525.0
The FWB 124 was my first high quality air rifle that I bought in the early 1980’s. I installed the Maccari (Air Rifle Headquarters) Slightly Softer Mainspring kit. I made the stock out of the same walnut blank that was used for my LGU. The reason that there’s an aluminum block at the butt end of the LGU stock is that I didn’t have enough wood left for the LGU after making my FWB 124 stock! The trigger is a Maccari (Air Rifle Headquarters) stainless steel trigger. As with my LGU, the receiver is glass-bedded and all the stock screws are pillar-bedded with aluminum tubes. The weight of this rifle with the Sightron scope is 14.3 lbs. For more background on this rifle, please check out my post on the FWB 300S vs FWB 124 shootout:
https://www.tapatalk.com/groups/yellow/fwb-124-and-fwb-300s-shootout-t239102.html
The Walther LGV belongs to Hector. He custom-tuned it with an anti-bounce piston (ABP). The ABP has a cavity in an enlarged piston stem that holds a non-Newtonian fluid steel. The enlarged stem also functions as a spring guide, it just happens to be inside the piston, not at the rear, as usual. The fluid steel holds a shape (behaves like a solid) when accelerated or under pressure, but when acceleration becomes zero (as when the bounce cycle starts), then the steel becomes fluid again and tries to remain in position by its internal inertia. So the piston is stopped from bouncing and the piston, by holding the position in the compression chamber, maintains the pressure behind the pellet, so that with the same energy input, it can achieve almost 10% more muzzle energy. The weight of this rifle with the Sightron scope is 13.1 lbs.
In Fig. 2.2 I test the accuracy of these rifles at 20 yards. All the shooting was done indoors with the rifles rested on sandbags. In Chapter 3 we will discuss the statistics of group sizes, but I think the key point is that one needs to shoot multiple groups. A single 5-shot, or even a single 10-shot group, doesn’t really say much about accuracy. Maybe it’s just my scientific skepticism, but if someone shows me an amazing 5-shot one-hole group, my first question would be what did the group right before or after that one-holer look like?! With a high quality 50x scope and a solid rest, operator error has been pretty much removed and the group sizes and positions are strictly due to the rifle.
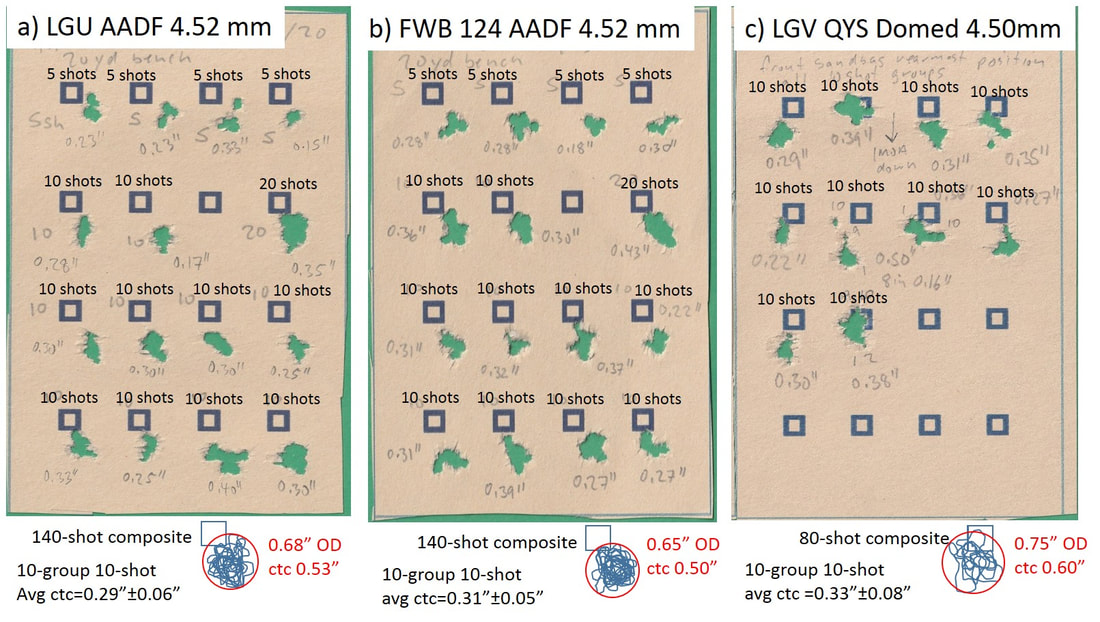
Fig. 2.2 Benchrested groups at 20 yards. For the LGU in a) and FWB 124 in b), there were four 5-shot, two 10-shot, and one 20-shot, followed by eight 10-shot groups. All the groups for the LGV in c) were 10-shot groups.
In Figs. 2.2 a) and b), I shot four 5-shot groups, two 10-shot groups, one 20 shot group, and then eight 10-shot groups with the LGU and FWB 124, respectively. About 20 warm-up shots were taken before the groups were fired for record. The most accurate pellets in my LGU and FWB 124 are the Air Arms Diabolo Field 8.44 gr 4.52 mm. For the LGV in Fig. 2.2c), I only shot 10-shot groups. I tried a few different pellets in Hector’s LGV and found that the Qiang Yuan Sports Domed 8.48 gr 4.50 mm pellets were the most accurate at 20 yards. Group sizes (hand written next to the aiming squares) varied quite a bit even for the 10-shot groups with center-to-center (ctc) distances varying by over a factor of two. The ctc distances were determined by measuring with a caliper the distance between the outer edges of the two most widely separated shots and subtracting the diameter of the hole each pellet makes in the paper (around 0.15”). The averages for ten 10-shot groups was around 0.3” for all three rifles. At the bottom of each target card, I traced out the pellet positions for each target and overlayed them to get composite groups. The composite target for the LGU and FWB 124 contain all 140 shots, which fit inside a circles with diameters under 0.7”. Since I made a scope elevation change for the LGV after the second group, which was destroying my aiming square, I only included the last 80 shots in the composite group. Although the LGV made nice 10-shot groups, the point of impact (POI) tended to drift more (mostly vertically) from group to group than with the other rifles. This is why it’s important to shoot multiple groups in series rather than putting all the shots into a single large groups. It’s hard to see slow drifts in POI in a single 100-shot group! For field target shooting and hunting, what matters most is not the small a 5-shot group a rifle produced, but the size of the kill zone into which a rifle can consistently place all its shots. One key conclusion here is that the 40-year old FWB 124 with its break barrel can hold its own against the latest generation of underlever and breakbarrel air rifles!
I could have simply shown the best groups for these rifles, for example the 0.17” 10-shot group for the LGU, the 0.22” 10-shot group for the FWB 124, and the 0.22” 10-shot group for the LGV, but this would not be telling the whole story and could even be misleading. If the groups were shot outdoors and I had to contend with wind, then it would make more sense to discard bad groups due to wind and focus on the best groups where wind was less of an issue. However, with these tests indoors, there are no external factors except for the rifle itself to blame for larger groups. The best groups here are simply due to luck, where fluctuations in the rifle/pellet system happened to cancel each other out better for one particular string of shots! In most sports, it makes sense to talk about personal bests, so I think we tend to use the best group that a rifle makes to judge its accuracy. However, as we will see in Ch. 3, there is a lot of randomness involved in a single 5-shot or 10-shot group. There is a reasonably good chance (1 in 36) that one could roll the same number three times in a row with a six-sided die, but does that make that die special? Any other die would have the same probability of achieving that remarkable string of rolls!
Figure 2.3 plots the ctc distance for each group. One can clearly see the fluctuations in ctc distances. In Figs. 2.3 a) and b) we can also see how the ctc distance varies with the number of shots in each group for the LGU and FWB 124, respectively. The 5-shot groups tend to be a bit smaller, but not by that much! In a purely random normal distribution (bell curve) one would expect the range of values to increase as one includes more samples. For example, if you measure the height of 20 students in a small classroom, the range of heights you get will be smaller than if you measure the height of 300 students in a large classroom (there’ll be a better chance that some really short and some really tall students can be found in the large classroom). For a normal distribution, this range of values should increase as the square root of the number of samples (in this case the number of student heights measured). Instead of looking at student height, here we are looking at where different shots land on the target. If we include more shots, there’s a better chance that one shot will land farther from the others. However, the group size (analogous to the range of heights in the student example), does not scale as the square root of the number of shots. If that were the case, the 10-shots groups should be 1.4 times bigger than the 5-shot groups (number of shots is twice as large, so we need to multiply the ctc distance by √ 2 = 1.4) and the 20-shot groups should be 1.4 times larger than the 10-shot groups and 2 times larger than the 5-shot groups. It would help if we had a few more 20-shot groups to get a better idea of the average 20-shot group size, but I think it’s clear that were not seeing bell curve scaling of the ctc distance with the number of shots in these groups.
I could have simply shown the best groups for these rifles, for example the 0.17” 10-shot group for the LGU, the 0.22” 10-shot group for the FWB 124, and the 0.22” 10-shot group for the LGV, but this would not be telling the whole story and could even be misleading. If the groups were shot outdoors and I had to contend with wind, then it would make more sense to discard bad groups due to wind and focus on the best groups where wind was less of an issue. However, with these tests indoors, there are no external factors except for the rifle itself to blame for larger groups. The best groups here are simply due to luck, where fluctuations in the rifle/pellet system happened to cancel each other out better for one particular string of shots! In most sports, it makes sense to talk about personal bests, so I think we tend to use the best group that a rifle makes to judge its accuracy. However, as we will see in Ch. 3, there is a lot of randomness involved in a single 5-shot or 10-shot group. There is a reasonably good chance (1 in 36) that one could roll the same number three times in a row with a six-sided die, but does that make that die special? Any other die would have the same probability of achieving that remarkable string of rolls!
Figure 2.3 plots the ctc distance for each group. One can clearly see the fluctuations in ctc distances. In Figs. 2.3 a) and b) we can also see how the ctc distance varies with the number of shots in each group for the LGU and FWB 124, respectively. The 5-shot groups tend to be a bit smaller, but not by that much! In a purely random normal distribution (bell curve) one would expect the range of values to increase as one includes more samples. For example, if you measure the height of 20 students in a small classroom, the range of heights you get will be smaller than if you measure the height of 300 students in a large classroom (there’ll be a better chance that some really short and some really tall students can be found in the large classroom). For a normal distribution, this range of values should increase as the square root of the number of samples (in this case the number of student heights measured). Instead of looking at student height, here we are looking at where different shots land on the target. If we include more shots, there’s a better chance that one shot will land farther from the others. However, the group size (analogous to the range of heights in the student example), does not scale as the square root of the number of shots. If that were the case, the 10-shots groups should be 1.4 times bigger than the 5-shot groups (number of shots is twice as large, so we need to multiply the ctc distance by √ 2 = 1.4) and the 20-shot groups should be 1.4 times larger than the 10-shot groups and 2 times larger than the 5-shot groups. It would help if we had a few more 20-shot groups to get a better idea of the average 20-shot group size, but I think it’s clear that were not seeing bell curve scaling of the ctc distance with the number of shots in these groups.
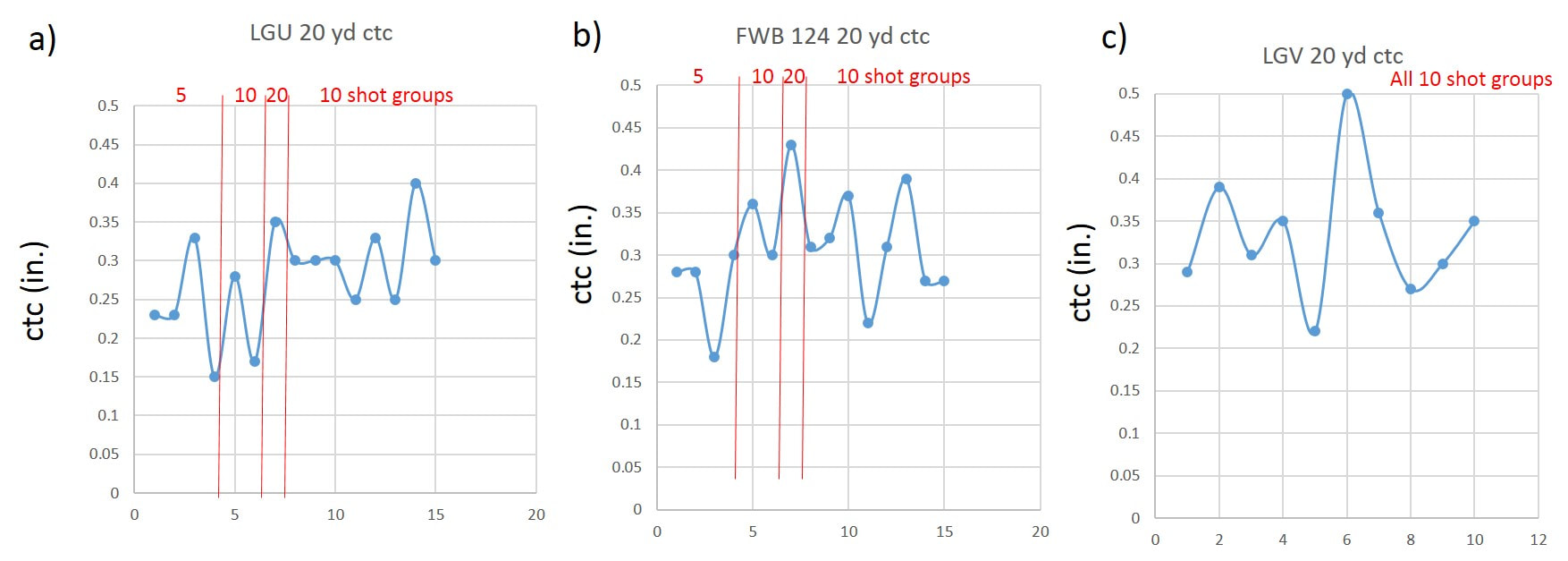
Fig. 2.3 Center-to-center group size for the three rifles benchrested at 20 yards. For the LGU and FWB 124, which had 5-shot, 10-shot, and 20 shot groups, the group size grows with the number of shots in the group, but not as much as one would expect for a perfectly random normal distribution.
In Fig. 2.4, I show how the ctc distance scales with the number of shots in each group. As we already suspected from Fig. 2.3, we see that the ctc distance does not grow as quickly with the number of shots in a group as one might expect from simple bell curve statistics. Instead of growing as the square root of the number of shots x ^ 0.5 (where x is the number of shots and “^” means that we’re taking x to the power of 0.5, which is the same as square root of x), the ctc distance grows as (x ^ 0.36) and (x ^ 0.29) for the FWB 124 and LGU, respectively. This is not too surprising, since there are some constraints on the POI. For example, the pellet will never land behind the shooter no matter how many shots are taken! Although I’m sure that this is commonly known, I couldn’t find a term for it, so I came up with “point of impact envelope” (POIE), that I would like to explore here. I think that every rifle has a POIE in which it will keep all its shots unless something disastrous happens. For example, there may be some side-to-side play in the barrel of a break-barrel springer, but as long as one doesn't loosen the barrel tension screw or hit the barrel to one side with a hammer, the range of possible orientations of the barrel will always be within a certain range and the horizontal spreading of shots due to barrel orientation will be the same whether 10 or 1,000 or 10,000 shots are taken (of course, there may be effects of wear after thousands of shots). So the POIE limits the maximum size of a group as the number of shots goes to infinity. In the example with students’ heights, there is also a height envelope. For example, I don’t think that there are any students taller than 20 feet, so the range of heights is also limited to some extent and does not simply grow forever as the one includes more and more students in the group.
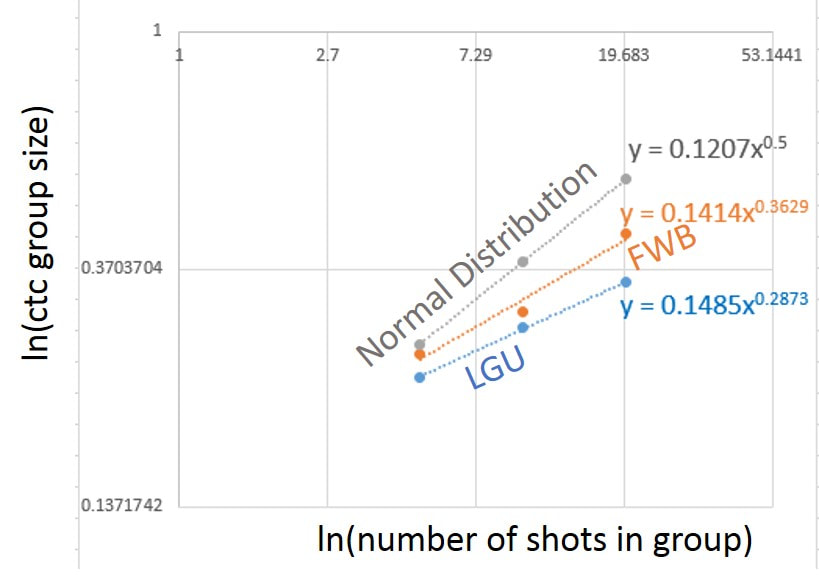
Fig. 2.4 Center-to-center group size scaling with the number of shots per group in a natural log vs natural log plot. For a normal distribution (bell curve), one would expect the ctc group size to scale as the square root of the number of shots (x ^ 0.5), but group sizes for both rifles scale more slowly. In fact, I would expect the group size to saturate at some point (the point of impact envelope), where adding more shots to a group does not cause the group to grow any more, unlike a normal distribution, whose width keeps growing without limit (albeit only as the square root) as the number of samples grows.
Since spring piston airguns generate their own power, the consistency of the powerplant is critical to accuracy. Figure 2.5 shows the muzzle velocity (MV) (in parts a-c) and muzzle energy (in parts d-e) for each shot in the strings shown in Fig. 2.2. The LGU and LGV show a decrease in MV as the rifle warms up. This is probably due to the synthetic piston seal expanding as it warms up, causing more friction between the piston seal and the compression chamber walls and thereby reducing the piston (and pellet) velocity. The MV from the FWB 124, using a factory seal, didn’t change much as the rifle warmed up. Maybe this is an indication of the difference between FWB and Walther piston seals? I also plotted the muzzle energy, which goes as the velocity squared, to look at how the energy that goes into a pellet changes. Later in this chapter, we will talk about the efficiency of these air rifles, so the muzzle energy is probably a better indicator of what the powerplant is doing than the MV. The standard deviations in the MV are fairly high. Some of this can be traced to the pellet. For example, with some tins of AADF and QYS Streamlined pellets in my LGU, I’ve measured MV standard deviations close to 3 fps, but with other pellets I’ve observed MV standard deviations of around 10 fps! Some of it may just be due to the nature of spring piston airguns. My Anschütz 2002 CA PCP match air rifle has MV standard deviations below 2 fps for several brands of pellets. On the other hand, my FWB 300s, which is also a spring piston airgun has MV standard deviations similar to my Anschütz 2002 CA PCP. Of course, the FWB 300S has a steel piston seal and shoots at much lower MV of around 500 fps. Since piston seal friction plays a big role here, the type of lubricant used can be very important. In Ch. 5, we’ll try Krytox in the LGU and FWB 124 to see if it changes MV and if it makes the MV more consistent.
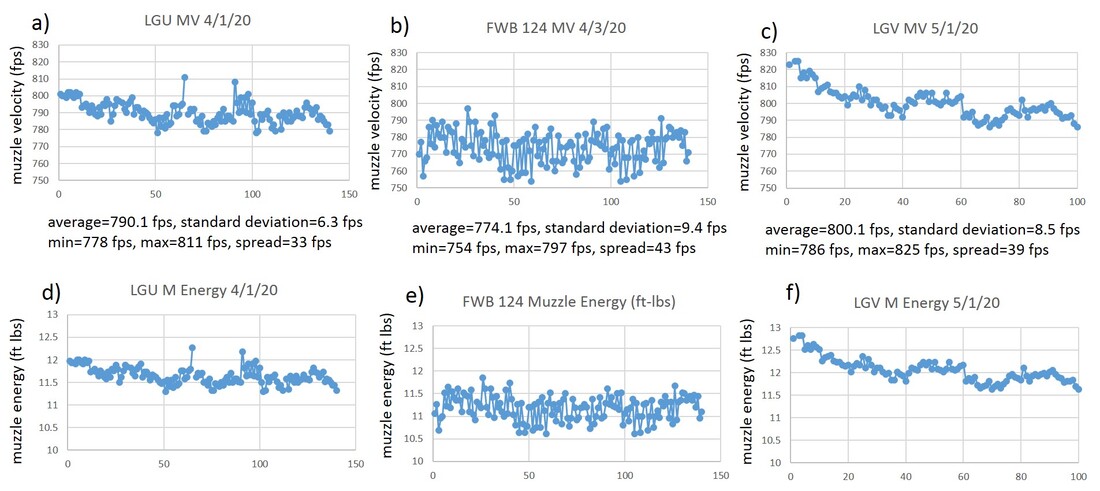
Fig. 2.5 Muzzle velocity a)-c) and muzzle energy d)-f) as a function of shot count for the LGU, FWB 124, and LGV for groups shown in Fig. 2.2.
There is a good chance that a spring-piston air rifle will not always be used off a bench. Since air rifles can be hold-sensitive, it’s important to explore how these rifles do when they are held in different positions. Since I use my air rifles in Field Target (FT) competitions, under WFTF Division rules, it’s critical to test how the rifle shoots from the sitting position, which is used for most shots in an FT match. Figure 2.6a) shows 5-shot groups from these rifles fired from three different positions at 20 yards. I must admit that I was out of practice for this test and my hold was pretty wobbly, but they all were affected by the same lack of practice so the comparison is still valid. The first sitting position, which I’ll call “elbow-top” here, is shown in Fig. 2.6b), where I place my right elbow on top of my right knee while sitting. This position is very stable vertically but does tend to string shots horizontally. Although this position feels pretty stable, it does tend to throw out flyers every now and then. This position doesn’t work very well with my FWB 124 (rifle hold seems more stable, but I get more fliers) and I’ve only been able to use it with my LGU, which is more forgiving of hold variations. The first three targets (from left to right) are from my LGU using the elbow-top hold. The target on the right in the top row is shooting the LGU off sandbags, as was done in Fig. 2.2. The second variation of the sitting position that I use is with my right forearm inside my right knee, which I’ll call “forearm-knee” here. This position may not feel as stable as the elbow-top, but seems to be more consistent. In the second row in Fig. 2.6 a) I shot three 5-shot groups using the forearm-knee position and one 5-shot group off the bench with my FWB 124. In this case, I had better groupings sitting than from the bench, which demonstrates that the FT sitting position can be pretty stable, on a good day! In the third row I repeated the forearm-knee and bench tests using the LGV. In the fourth row I repeated the forearm-knee and bench tests using the LGU. The POI using the two different sitting positions with the LGU (elbow-top in row 1 and forearm-knee in row 3) are quite similar. The forearm-knee position gave slightly tighter groups, with less horizontal stringing. On the lowest circular target, I went back to the elbow-top position with the LGU to compare with earlier target using this position. The POI went up and to the right a bit, but the size of the group was similar to what I found in the first row. In all three rifles, the POI shifted down about 0.5” and a bit to the right when going from sitting to benchrested positions. I have yet to try a 12 ft-lb spring piston air rifle that didn’t exhibit this behavior (ok I’ve only tried three)! The POI in the standing/offhand position (not shown here), tends to be similar to the benchrested POI. It’s ironic that the most stable (benchrested) and least stable (standing) positions have similar POI, with the sitting position, which is between the two in terms of stability, producing a POI that is higher and to the left. For me, the kneeling position (not shown here), has a similar POI as sitting.
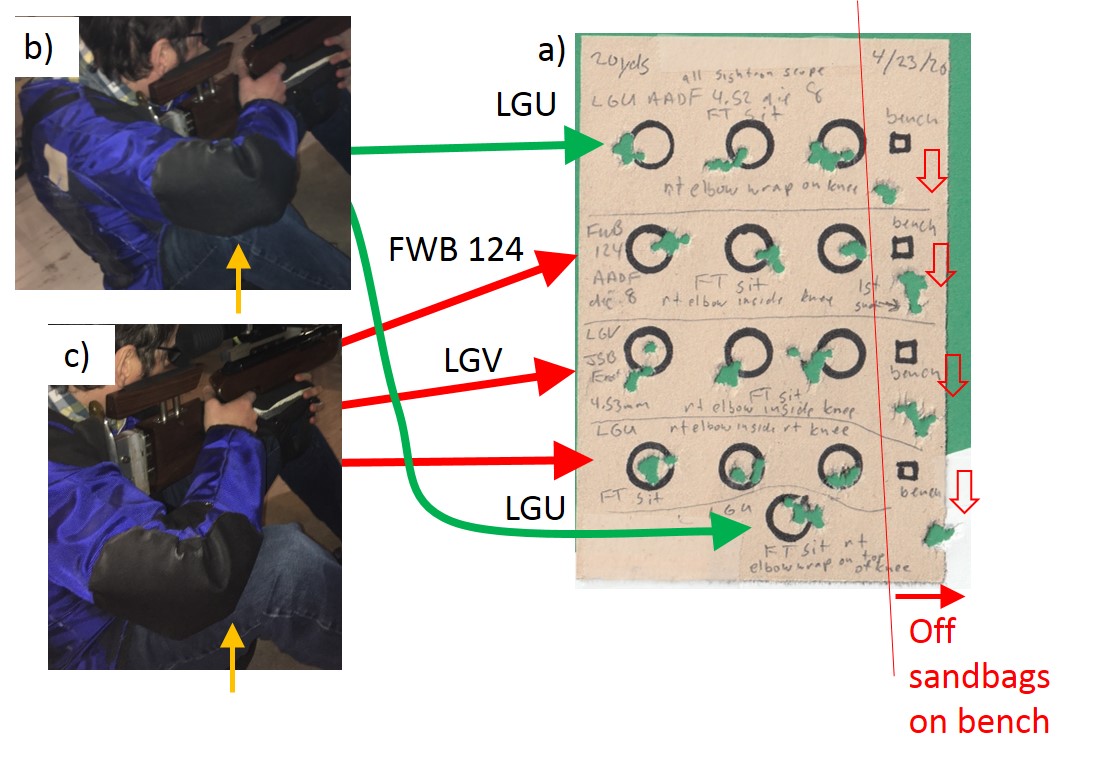
Fig. 2.6 5-shot groups at 20 yards shot from field target sitting position (circular targets) and bench (square targets) in a). Two types of sitting position were used: b) right elbow resting on top of knee and c) right forearm on the inside of knee. All rifles exhibit a similar drop in POI when going from sitting to bench. I had better groupings with the FWB 124 sitting than benchrested!
Since the shift in POI in going from the benchrest to the sitting position seems to be very robust and universal, I did some further testing to figure out what causes this shift. I typically shoot the benchrested position using the artillery hold, with no contact between the rifle buttpad and my shoulder. The rifle is held very lightly and allowed to recoil as freely as possible on the sandbags. In the sitting, kneeling, and standing positions, the rifle buttpad is in firm contact with my shoulder. I’ve noticed that when I pulled the rifle tighter against my shoulder in the sitting position, the POI went up (maybe this is what happened in the last target from the sitting position at the bottom of Fig. 2.6a?), so in Fig. 2.7, I tested the effects of shoulder pressure on POI. In Fig. 2.7, I shot the LGU at 20 yards from four different positions. A: benchrested, artillery hold with no contact between shoulder and buttpad; B: benchrested with buttpad pulled against shoulder; C: elbow-top sitting (see Fig. 2.3b); D: forearm-knee sitting (see Fig. 2.3c). Again, we see that the POI shifts up and left when going from artillery-hold benchested (A) to the sitting positions (C and D). Lots of things change when going from the benchrested to sitting positions, so in position B, the only thing I changed was pulling the rifle against my right shoulder. Everything else was the same as in the benchrested artillery-hold position (A). Although there are some variations in the difference between the POI of the artillery-hold benchrested (A) and the shoulder contact benchrested (B) positions, the POI for B was consistently higher than for A. Of course the POI for the sitting positions (C and D) was even higher. It’s not clear to me whether this is due to barrel harmonics changing with the shoulder pressure, or whether the rifle tends to rotate upward due to the shoulder pushing against the recoiling rifle. Since this effect is seen in all three rifles, I tend to think that the rotation explanation works better since it should be similar in all three rifles whereas barrel harmonics could be very different among the three rifles. However, it’s clear that shoulder pressure is a dominant cause of the higher POI.
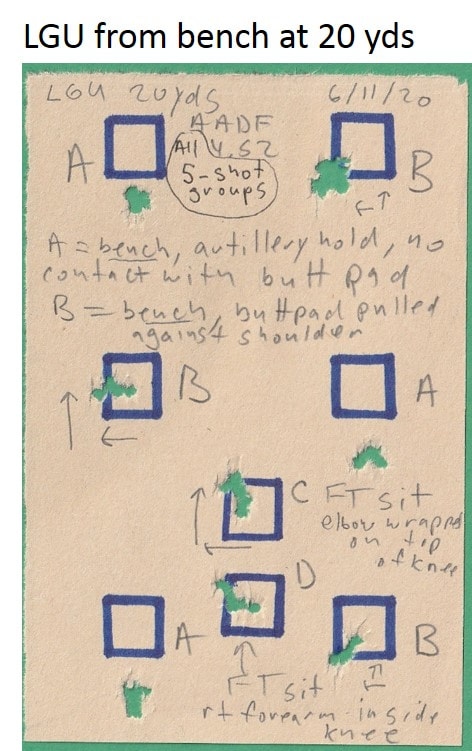
Fig. 2.7 5-shot groups with the LGU at 20 yards shot from four different positions. A: bench, artillery hold with no contact between shoulder and buttpad; B: bench with buttpad pulled against shoulder; C: FT sitting with right elbow wrapped around/resting on top of right knee (see Fig. 2.3b); and D: FT sitting with right forearm inside right knee (see Fig. 2.3c). Buttpad contact on shoulder causes POI to shift up and left, no matter what position is used.
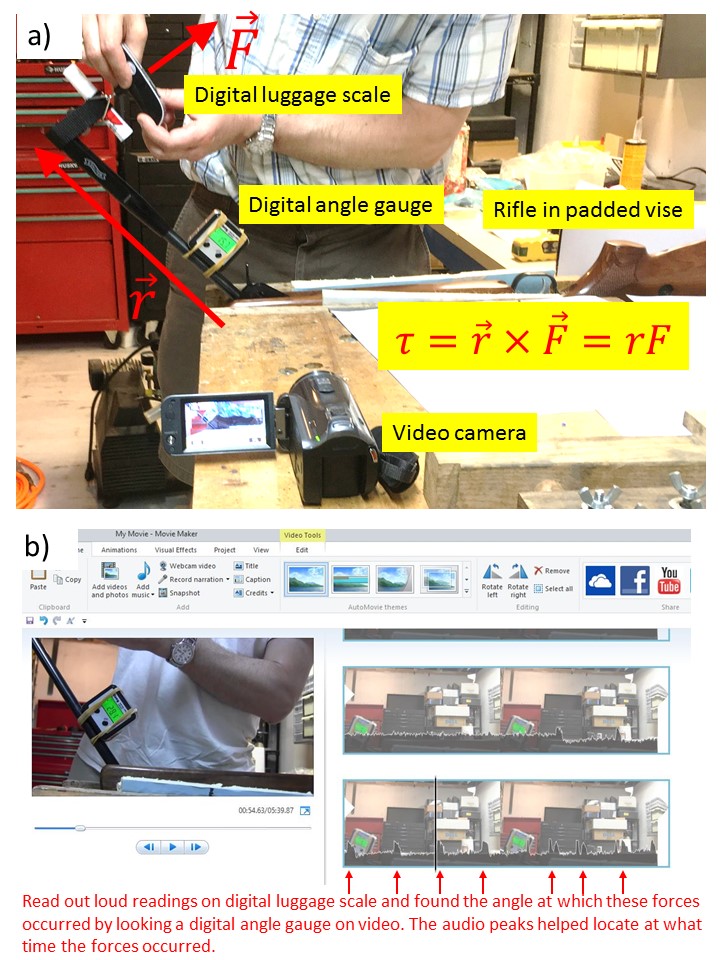
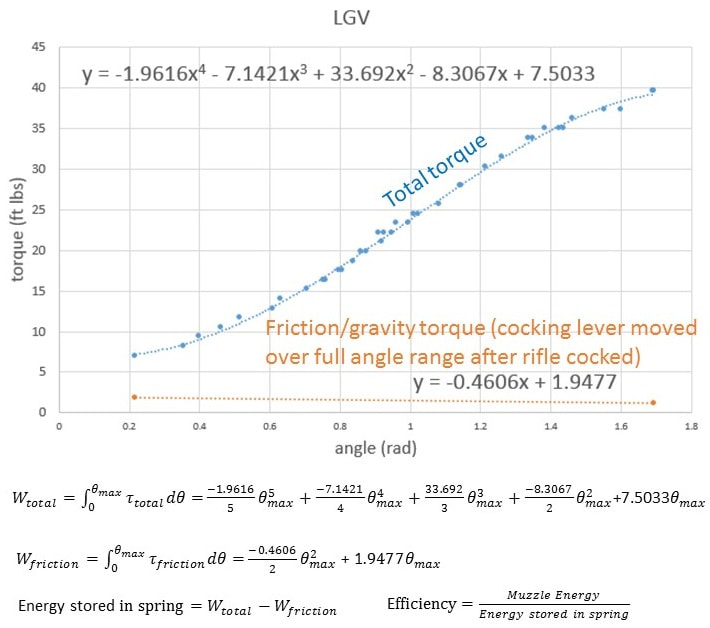
In Fig. 2.2, we saw that the veteran FWB 124 was very competitive in terms of accuracy, but how does it compare in terms of efficiency with the LGV and LGU, that use the latest in materials and design? Although the LGU and LGV use the same spring and piston, the LGV transfer port (TP) is offset and is much longer. How do the LGV and LGU efficiencies compare? In Fig. 2.8, I look at the work required to cock these three rifles. The cocking force vs barrel/lever angle look very similar, with the characteristic s-shaped curve that we discussed in Ch. 1.
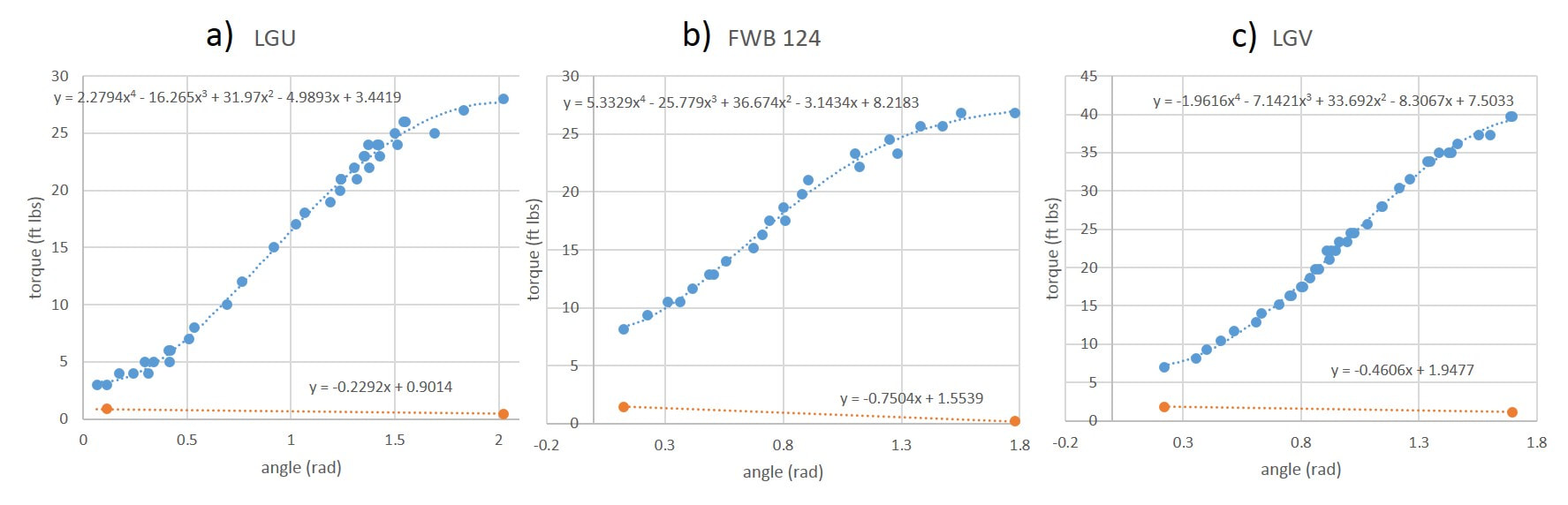
Fig. 2.8 Torque as a function of cocking lever/barrel angle for the a) LGU, b) FWB 124, and c) LGV. By integrating the curves (areas under the curves) one can obtain the total work to cock the rifles. By subtracting the work lost to friction and gravity (initially the barrel must be lifted) one can estimate the energy stored in the spring. Dividing the muzzle energy by the energy stored in the spring determines the efficiency of the rifle.
If we compare the work that goes into cocking the spring (Fig. 2.8) with the energy that comes out with the pellet, we can obtain the efficiency of a spring piston air rifle. The efficiencies of the three rifles are shown in Fig. 2.9. Maybe here one can see the age of the FWB 124’s design, with the lowest (but still pretty good) efficiency? Surprisingly, the LGV with its long TP had efficiencies with JSB Exact and QYS Dome pellets that were very close to the LGU. In fact the LGV did a little better than the LGU with the JSB Exacts. The LGU with its short, central TP had the highest efficiencies and did well with all the pellets. It’s hard to speak of overall efficiency, since there was a lot of variation in muzzle energy (and therefore efficiency) with different kinds of pellets. The main takeaway here is that the LGV with its long non-central TP is pretty much just as efficient as the LGU with its short central TP! This may be due to the 10% gain in muzzle energy from the anti-bounce piston, so in Chapter 4, we’ll take another look at the efficiencies of the LGU and LGV with swapped pistons and mainsprings.
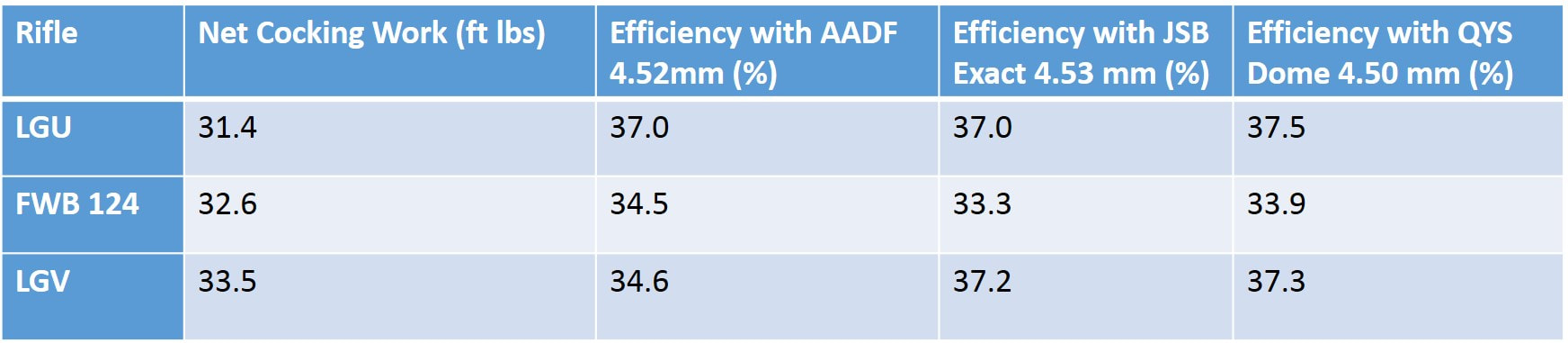
Fig. 2.9 Efficiency of the LGU, FWB 124 and LGV with various pellets.
Another important factor in helping us get the most accuracy out of an air rifle is the trigger pull. All three of the rifles had modified triggers. I installed a replacement trigger from Tony Leach in my LGU. The tips of the set screws were originally polished to a fairly fine point, which allows more precise leverage, but I rounded these to a larger radius of curvature to make sure that they don’t scratch the bottom sear. Photos and a more detailed description can be found at:
https://www.gatewaytoairguns.org/GTA/index.php?topic=168525.0
This is a wonderful two stage trigger that comes pretty close to the light weight and crispness of the triggers on my Anschütz 2002CA and FWB 300S! This trigger changed the way I shoot at FT matches. I simply let the rifle sit where it wants and can pull the trigger without moving the rifle off target.
Hector modified his LGV trigger by adding longer adjustment set screws. The trigger pull is a bit heavier than the Leach trigger, but it is more than light and crisp enough for a clean trigger pull that doesn’t disturb one’s aim. Photos and a more detailed description can be found at:
https://www.ctcustomairguns.com/hectors-airgun-blog/a-yankee-tune-for-the-walther-lgu
Unfortunately, the FWB 124 doesn’t have the multilever lever arrangement with adjustable engagement points like the LGV and LGU, which use the same trigger and are very similar in design to the Weihrauch Rekord and Air Arms TX 200 triggers. However, with careful honing of the engagement surfaces and adjusting the pull weight screw so that one just barely feels the second stage engage, one can get a pretty good trigger pull in the FWB 124. I had a hard time figuring out how the FWB 124 trigger works and found the article below to be very helpful:
https://forum.vintageairgunsgallery.com/feinwerkbau-rifles/feinwerkbau-modell-124/
In my FWB 124 I replaced the factory aluminum trigger blade with a solid stainless steel trigger blade from Jim Maccari at Air Rifle Headquarters. I could feel the original aluminum trigger flex as the shot was about to be released, but that’s not a problem with the beefy stainless steel trigger. One can lower the pull weight by backing the adjustment screw out to the point that one loses the second stage, but this results in a long (albeit fairly light) pull with no hint of when the rifle will fire. By screwing in the adjustment screw until one can just barely feel the second stage engage, one can get a very predictable two-stage pull. On my FWB 124, the trigger feels like it snaps into a position as the second stage engages, and then it takes only a bit more pressure to release the shot.
Figure 2.10 shows the trigger pull weight for 10 shots with the a) LGU, b) FWB 124, and c) LGV. The light pull weights on the LGV and LGU make them easier to shoot accurately, but the FWB 124 trigger also works great. The pull weights are also quite consistent.
https://www.gatewaytoairguns.org/GTA/index.php?topic=168525.0
This is a wonderful two stage trigger that comes pretty close to the light weight and crispness of the triggers on my Anschütz 2002CA and FWB 300S! This trigger changed the way I shoot at FT matches. I simply let the rifle sit where it wants and can pull the trigger without moving the rifle off target.
Hector modified his LGV trigger by adding longer adjustment set screws. The trigger pull is a bit heavier than the Leach trigger, but it is more than light and crisp enough for a clean trigger pull that doesn’t disturb one’s aim. Photos and a more detailed description can be found at:
https://www.ctcustomairguns.com/hectors-airgun-blog/a-yankee-tune-for-the-walther-lgu
Unfortunately, the FWB 124 doesn’t have the multilever lever arrangement with adjustable engagement points like the LGV and LGU, which use the same trigger and are very similar in design to the Weihrauch Rekord and Air Arms TX 200 triggers. However, with careful honing of the engagement surfaces and adjusting the pull weight screw so that one just barely feels the second stage engage, one can get a pretty good trigger pull in the FWB 124. I had a hard time figuring out how the FWB 124 trigger works and found the article below to be very helpful:
https://forum.vintageairgunsgallery.com/feinwerkbau-rifles/feinwerkbau-modell-124/
In my FWB 124 I replaced the factory aluminum trigger blade with a solid stainless steel trigger blade from Jim Maccari at Air Rifle Headquarters. I could feel the original aluminum trigger flex as the shot was about to be released, but that’s not a problem with the beefy stainless steel trigger. One can lower the pull weight by backing the adjustment screw out to the point that one loses the second stage, but this results in a long (albeit fairly light) pull with no hint of when the rifle will fire. By screwing in the adjustment screw until one can just barely feel the second stage engage, one can get a very predictable two-stage pull. On my FWB 124, the trigger feels like it snaps into a position as the second stage engages, and then it takes only a bit more pressure to release the shot.
Figure 2.10 shows the trigger pull weight for 10 shots with the a) LGU, b) FWB 124, and c) LGV. The light pull weights on the LGV and LGU make them easier to shoot accurately, but the FWB 124 trigger also works great. The pull weights are also quite consistent.
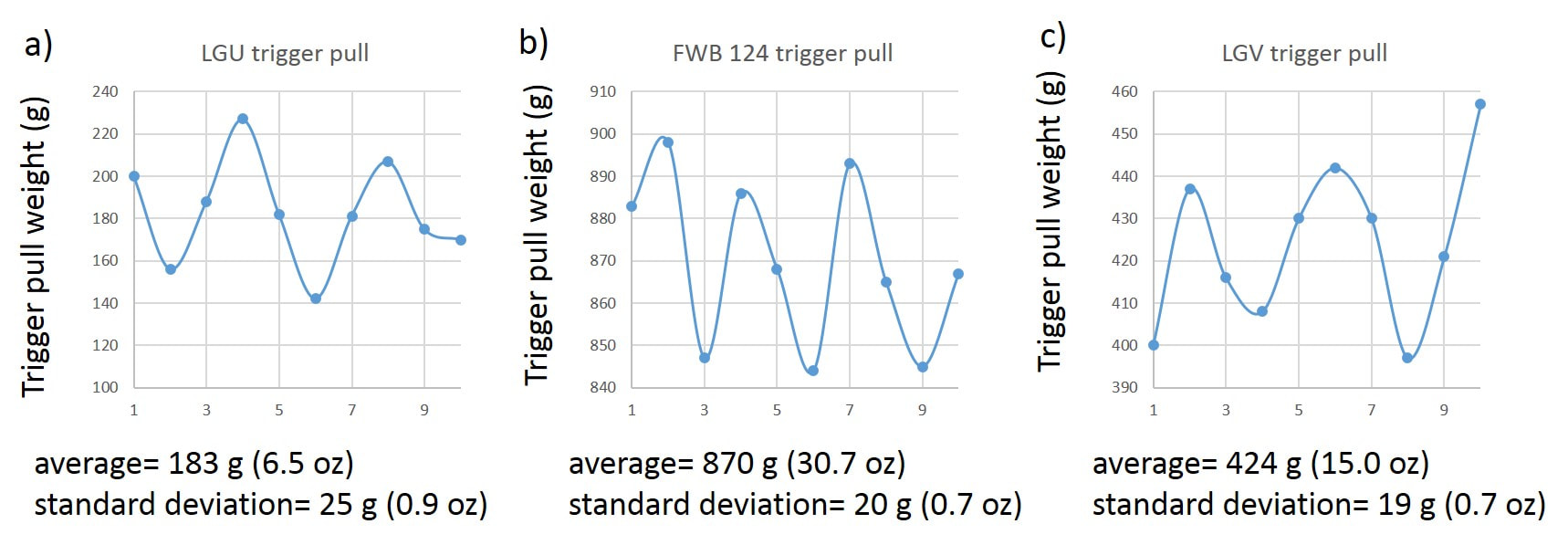
Fig. 2.10 Trigger pull weight for ten shots for the a) LGU, b) FWB 124, and c) LGV.
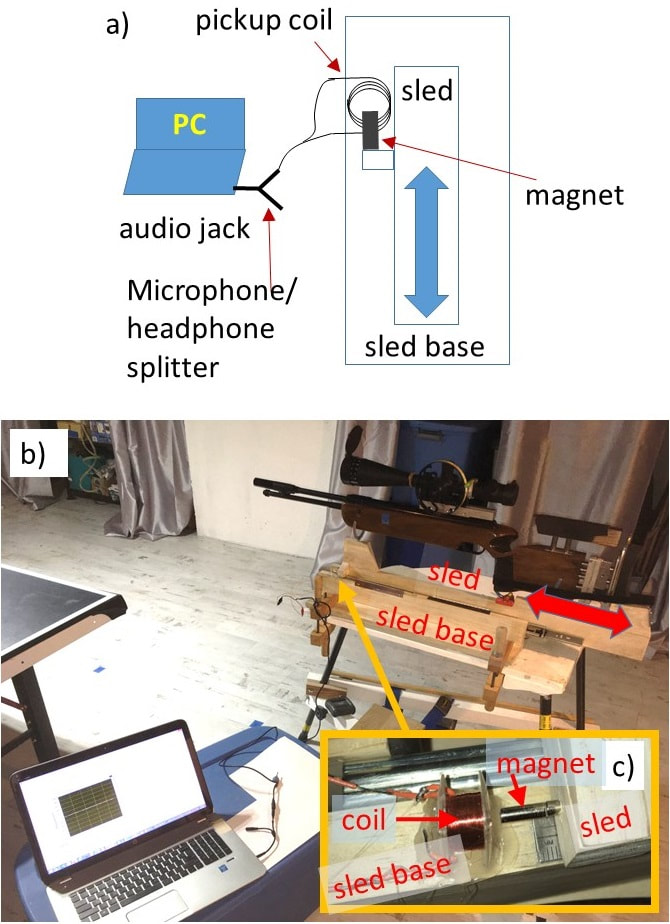
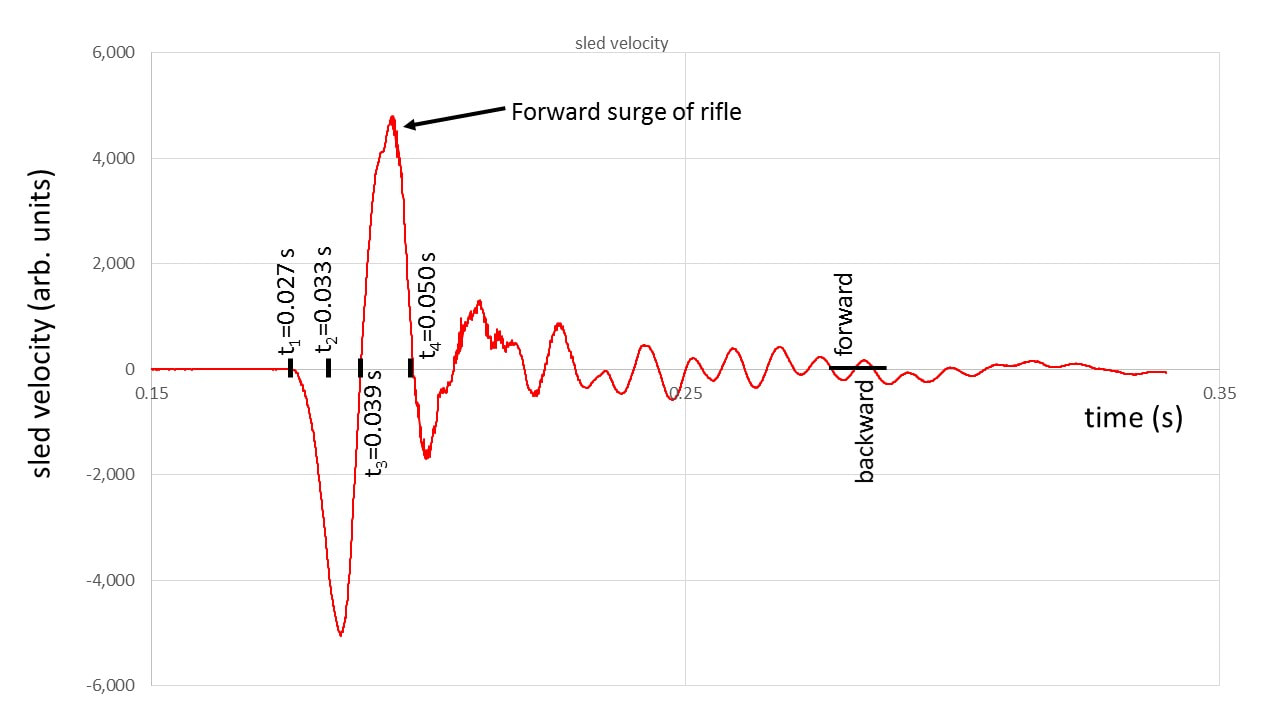
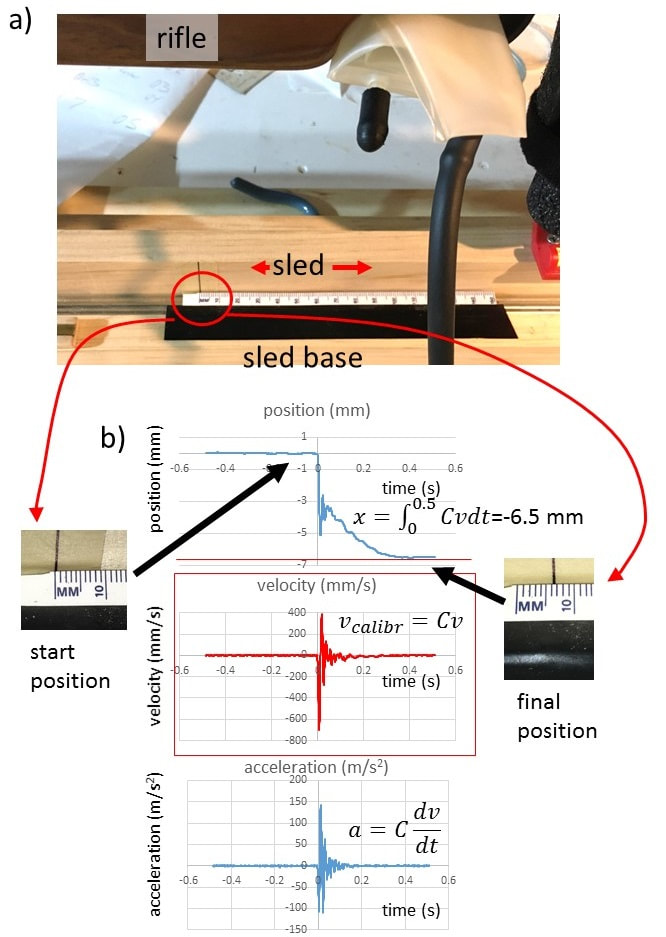
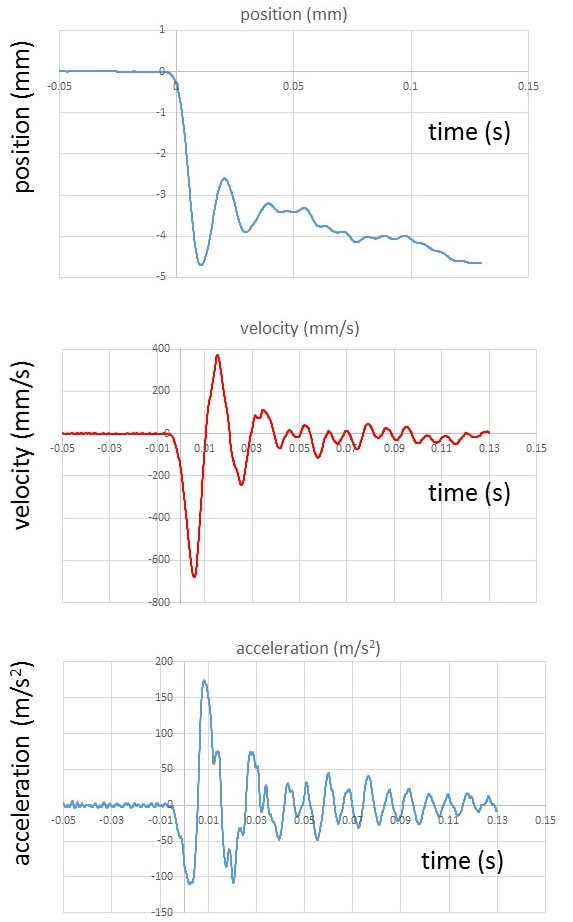
We finish this chapter by looking at how the three rifles recoil using the dynamograph. There is some universal behavior in the recoil of all three rifles, but there are also some interesting differences. Figure 2.11 shows the position, velocity, and acceleration as functions of time for all three rifles. It’s important to remember that the LGU and FWB 124 with their target stocks weigh about 2 to 3 pounds more than the LGV. The pickup coil measures the sled/rifle velocity, which is plotted in red, and then we use calculus to determine the position and acceleration of the rifle from the measured velocity. All three rifles initially recoil backwards (negative velocity) as the piston accelerates forward at the start of the shot. Approximately 10 ms later, the piston starts moving backward, causing the rifle to move forward (positive velocity). The ratios of the forward peak velocity to the backward peak velocity are remarkably similar, with values of 0.52, 0.50, and 0.54 for the LGU, FWB 124, and LGV, respectively. The peak forward and backward velocities for the LGU (-700 mm/s backward and 365 mm/s forward) and FWB 124 (-700 mm/s backward and 350 mm/s forward) are very similar. The velocities of all three rifles oscillate at longer times, but the FWB 124 shows a distinctive higher frequency ringing (wiggles). This is probably due to the loose fitting metal spring guide that allows the spring to buzz after the shot. The spring guide and top hat in the LGU fit the spring very tightly, which greatly reduces spring vibrations. In the LGU and FWB 124, the spring and piston are nearly dry, with only a very light coating of moly and Superlube. On the other hand, the LGV mainspring is coated with spring tar. It’s also informative to look at the acceleration as a function of time. Remember, acceleration tells us how fast the velocity is changing. In all three rifles, the initial dip in backward acceleration is smaller than the first peak in forward acceleration, which suggests that the spring initially pushes the piston forward more gently causing it to pick up speed more slowly compared to the more abrupt stopping of the piston’s forward motion and bounce toward the rear when it reaches the front of the compression chamber. Qualitatively, the traces for the LGU and LGV look very similar, with the main quantitative difference probably coming from the difference in the weight of the two rifles. In addition to the higher frequency ringing, the FWB 124 also shows a very large and sharp backward acceleration spike at around 0.018 s. Maybe this is the piston bouncing hard forward after the rearward surge?

Fig. 2.11 Recoil traces showing the position, velocity, and acceleration of the sled-mounted rifle over 250 ms for the a) LGU, b) FWB 124, and c) LGV. Note that the rifles first move backward (velocity and acceleration are negative), but then the rifles surge forward as the piston stops and starts moving backward. This is followed by oscillations. The net overall movement of all three rifles is backward.
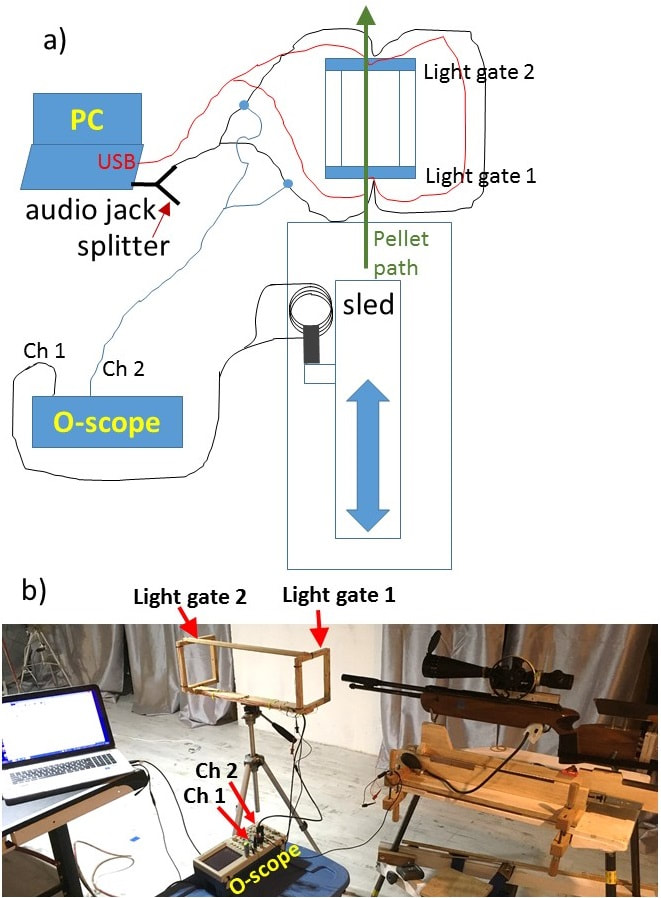
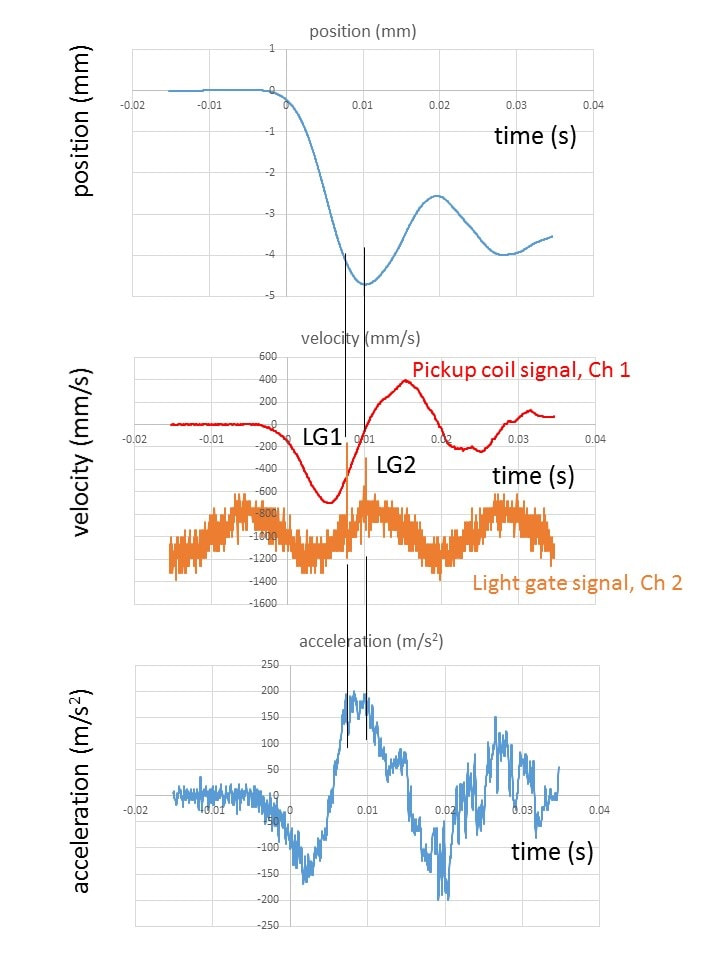
Since the pellet leaves the barrel in less than 12 ms, only the initial recoil will affect accuracy, so in Fig. 2.12, I’ve zoomed in on the first part of the recoil. I’ve also included the light gate signal so that we can see when the pellet leaves the barrel. In all three rifles, the pellet leaves the barrel at the peak forward acceleration of the rifle, when the piston is still moving forward but is slowing down the most rapidly on the cushion of compressed air that is ahead of it. The time from the start of the recoil motion to when the pellet leaves the barrel (first spike in light gate signal orange trace, indicated by vertical red lines) is very similar for all three rifles. It’s between 10 and 11 ms. Remember, that a pellet traveling 800 fps covers 1” in about 0.1ms, so differences in barrel length will also affect this time. It’s also hard to determine precisely when the rifle started moving backward since the initial rearward motion starts gradually.
I recently built a system to measure Pellet Dwell Time (time from trigger pull to pellet leaving the muzzle). I placed a contact microphone on the receiver tube near the trigger, which picks up the sound of the sear tripping. The signal from the microphone is sent to one of the channels on the oscilloscope, and the other channel records the light gate signal, allowing the time between sear release and pellet exit to be measured. This setup is too new to be included in this series, but I hope to post the results someday soon.
Now one can see more clearly that the initial backward acceleration of all three rifles is smaller than the forward acceleration when the piston bounces, which is consistent with the picture of the initial gradual push that the spring imparts on the piston and the more abrupt bounce of the piston backward when it reaches the front end of the compression chamber. One dramatic difference is that the first dip in the backward acceleration of the FWB 124 (-130 m/s²) is significantly smaller in magnitude compared to the dips in the backward accelerations of the LGU (-150 m/s²) and LGV (-244 m/s²). I think that this is due to the longer and softer spring in the FWB 124 compared to the shorter and stiffer springs in the LGV and LGU. The preload in the FWB 124 is around 1.5” while the LGU and LGV have only about 1” of preload. Since the LGV and LGU get more energy out of their springs with less preload than the FWB 124, they must have stiffer springs. It would be very interesting to see what longer and softer mainsprings in the LGU and LGV would do to their recoil cycles. I agree with Jim Tyler in his July 2018 Airgun World column, that softer springs with more preload can soften piston bounce and improve accuracy. Although the reduction in backward acceleration of the FWB 124 is consistent with a softer spring, it doesn’t look like the peak positive acceleration at the piston bounce is reduced that much compared to the LGU. To test this, we really should try different springs and preloads in the same rifle, rather than comparing different rifles with different preloads. When the piston bounces back, the rifle moves forward and one gets a peak in the rifle velocity in the red traces in Fig. 2.12. According to that peak, the anti-bounce piston mechanism does not appear to be significantly decreasing the piston bounce in the LGV compared to the LGU and FWB 124.
On the other hand, since the pellet has left the rifle before the rifle starts moving forward, maybe we shouldn’t be so concerned with piston bounce, at least as far as accuracy is concerned? Of course, it would be much better to try a regular piston in the same LGV rifle and compare it to the ABP results, rather than comparing with other rifles. We’ll take another look at this in Ch. 4. Now that we have the capability to record the recoil traces with sub-ms time resolution, we can see with great detail what tuning is doing to the recoil cycle!
I recently built a system to measure Pellet Dwell Time (time from trigger pull to pellet leaving the muzzle). I placed a contact microphone on the receiver tube near the trigger, which picks up the sound of the sear tripping. The signal from the microphone is sent to one of the channels on the oscilloscope, and the other channel records the light gate signal, allowing the time between sear release and pellet exit to be measured. This setup is too new to be included in this series, but I hope to post the results someday soon.
Now one can see more clearly that the initial backward acceleration of all three rifles is smaller than the forward acceleration when the piston bounces, which is consistent with the picture of the initial gradual push that the spring imparts on the piston and the more abrupt bounce of the piston backward when it reaches the front end of the compression chamber. One dramatic difference is that the first dip in the backward acceleration of the FWB 124 (-130 m/s²) is significantly smaller in magnitude compared to the dips in the backward accelerations of the LGU (-150 m/s²) and LGV (-244 m/s²). I think that this is due to the longer and softer spring in the FWB 124 compared to the shorter and stiffer springs in the LGV and LGU. The preload in the FWB 124 is around 1.5” while the LGU and LGV have only about 1” of preload. Since the LGV and LGU get more energy out of their springs with less preload than the FWB 124, they must have stiffer springs. It would be very interesting to see what longer and softer mainsprings in the LGU and LGV would do to their recoil cycles. I agree with Jim Tyler in his July 2018 Airgun World column, that softer springs with more preload can soften piston bounce and improve accuracy. Although the reduction in backward acceleration of the FWB 124 is consistent with a softer spring, it doesn’t look like the peak positive acceleration at the piston bounce is reduced that much compared to the LGU. To test this, we really should try different springs and preloads in the same rifle, rather than comparing different rifles with different preloads. When the piston bounces back, the rifle moves forward and one gets a peak in the rifle velocity in the red traces in Fig. 2.12. According to that peak, the anti-bounce piston mechanism does not appear to be significantly decreasing the piston bounce in the LGV compared to the LGU and FWB 124.
On the other hand, since the pellet has left the rifle before the rifle starts moving forward, maybe we shouldn’t be so concerned with piston bounce, at least as far as accuracy is concerned? Of course, it would be much better to try a regular piston in the same LGV rifle and compare it to the ABP results, rather than comparing with other rifles. We’ll take another look at this in Ch. 4. Now that we have the capability to record the recoil traces with sub-ms time resolution, we can see with great detail what tuning is doing to the recoil cycle!
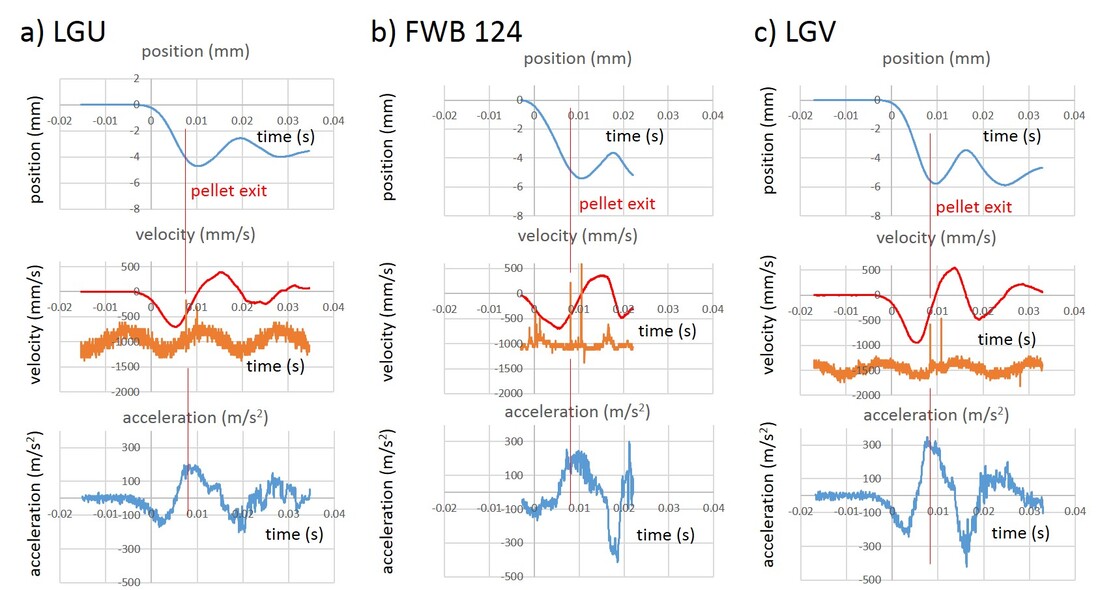
Fig. 2.12 Recoil traces showing the position, velocity, and acceleration of the sled-mounted rifle zoomed into a 50 ms window for the a) LGU, b) FWB 124, and c) LGV. The lower, orange traces plotted in the middle velocity panels show the light gate signals, with the first pulse occurring when the pellet is about 2” in front of the muzzle (vertical red lines) and the second pulse occurring when the pellet passes the second light gate, approximately 25” in front of the muzzle.
 RSS Feed
RSS Feed